Az utcai bűnözés nagyon gyakori a modern században. Mindenkinek biztonságban kell éreznie magát, ha otthon van, akár éjszaka, akár nappal alszik. Tehát számos biztonsági riasztórendszer elérhető a piacon. Ezek a rendszerek nagyon hatékonyak, de költségesek. A betörő riasztás vagy behatoló riasztás alapvetően elektronikus eszköz, amely riasztást ad, ha behatolót észlel az otthonban. Otthon készíthetünk behatoló riasztási áramkört, amely szinte ugyanolyan hatékony lesz egy adott távolságtartományban, és nagyon alacsony költséggel jár.

Biztonsági riasztás
Ez a cikk a betolakodó riasztásról szól Arduino és PIR érzékelő használatával. Amikor a PIR érzékelő behatolót észlel, jelet küld az Arduino-nak, és az Arduino riasztást ad. Ez az áramkör nagyon egyszerű, és egy Veroboardon lesz kialakítva. Ez Veroboard a ház azon részére telepítik, ahol nagyobb a behatoló veszélye, hogy bejut a házba.
Hogyan tervezzünk PIR szenzor alapú behatoló riasztást?
A projekt megkezdésének legjobb módja az, hogy összeállítja az összetevőket, és áttanulmányozza ezeket az összetevőket, mert senki sem akar egy projekt közepén maradni, csak egy hiányzó alkatrész miatt. Készítsünk egy listát az összetevőkről, vásároljuk meg őket, és kezdjük el a projektet. A Vero Board előnyös az áramkör hardveren történő összeállításához, mert ha az alkatrészeket a kenyérlapon állítjuk össze, akkor azok leválhatnak róla, és az áramkör rövid lesz, ezért a Veroboard előnyös.
1. lépés: Összetevők gyűjtése (hardver)
- 10k ohmos ellenállás
- VEZETTE
- Berregő
- 9V-os akkumulátor
- 9V-os elemkapocs
- Veroboard
- Csatlakozó vezetékek
- Digitális multiméter
2. lépés: Szükséges alkatrészek (szoftver)
- Proteus 8 Professional (letölthető innen: Itt )
A Proteus 8 Professional letöltése után tervezze meg rajta az áramkört. Ide illesztettem szoftverszimulációkat, hogy a kezdők számára kényelmes legyen az áramkör megtervezése és a hardver megfelelő csatlakoztatása.
3. lépés: Az áramkör működése
Ennek az áramkörnek a működése nagyon egyszerű. Eleinte a PIR érzékelő állapotát LOW-ra állítja. ez azt jelenti, hogy nincs mozgás. Amikor a PIR érzékelő mozgást érzékel, akkor jelet küld a mikrovezérlőnek. Ezután a mikrovezérlő bekapcsolja a hangjelzőt és a LED-et. Ha nem érzékel mozgást, a LED és a hangjelző kikapcsolt állapotban marad.
4. lépés: Az alkatrészek összeszerelése
Most, hogy ismerjük a projekt fő kapcsolatait és a teljes áramkört, lépjünk előre, és kezdjük meg a projekt hardverének elkészítését. Egy dolgot szem előtt kell tartani, hogy az áramkörnek kompaktnak kell lennie, és az alkatrészeket olyan közel kell elhelyezni.
- Vegyünk egy Veroboardot, és kaparópapírral dörzsöljük az oldalát a réz bevonattal.
- Most óvatosan és elég közel helyezze el az alkatrészeket, hogy az áramkör mérete ne legyen túl nagy
- Vegyünk két darab női fejlécet, és tegyük a Veroboardra úgy, hogy a köztük lévő távolság megegyezzen az Arduino nano tábla szélességével. Később ezekbe a női fejlécekbe felszereljük az Arduino nano táblát.
- Óvatosan hozza létre a csatlakozásokat forrasztópáka segítségével. Ha bármilyen hibát követnek el a kapcsolatok létrehozása során, próbálják meg a kapcsolat szétzilálását és a csatlakozás megfelelő forrasztását, de végül a csatlakozásnak szorosnak kell lennie.
- Miután az összes csatlakozás létrejött, végezzen folytonossági tesztet. Az elektronikában a folytonossági teszt egy elektromos áramkör ellenőrzése annak ellenőrzésére, hogy az áram áramlik-e a kívánt úton (hogy ez biztosan teljes áramkör-e). A folytonossági tesztet egy kis feszültség (LED-elrendezéssel vagy háborgással létrehozó alkatrész, például piezoelektromos hangszóró) elrendezésével kell elvégezni.
- Ha a folytonossági teszt sikeres, az azt jelenti, hogy az áramkör a kívánt módon elkészül. Most készen áll a tesztelésre.
- Csatlakoztassa az akkumulátort az áramkörhöz.
Most ellenőrizze az összes kapcsolatot az alábbi kapcsolási rajz alapján:

Kördiagramm
5. lépés: Az Arduino használatának megkezdése
Ha még nem ismeri az Arduino IDE-t, ne aggódjon, mert az Arduino IDE mikrokontroller táblával történő beállításának és használatának lépésről lépésre történő leírását az alábbiakban ismertetjük.
- Töltse le az Arduino IDE legújabb verzióját innen: Arduino.
- Csatlakoztassa Arduino Nano kártyáját a laptophoz, és nyissa meg a kezelőpanelt. a vezérlőpulton kattintson a gombra Hardver és hang . Most kattintson a gombra Eszközök és nyomtatók. Itt keresse meg azt a portot, amelyhez a mikrokontroller kártya csatlakozik. Az én esetemben az COM14 de a különböző számítógépeken más.
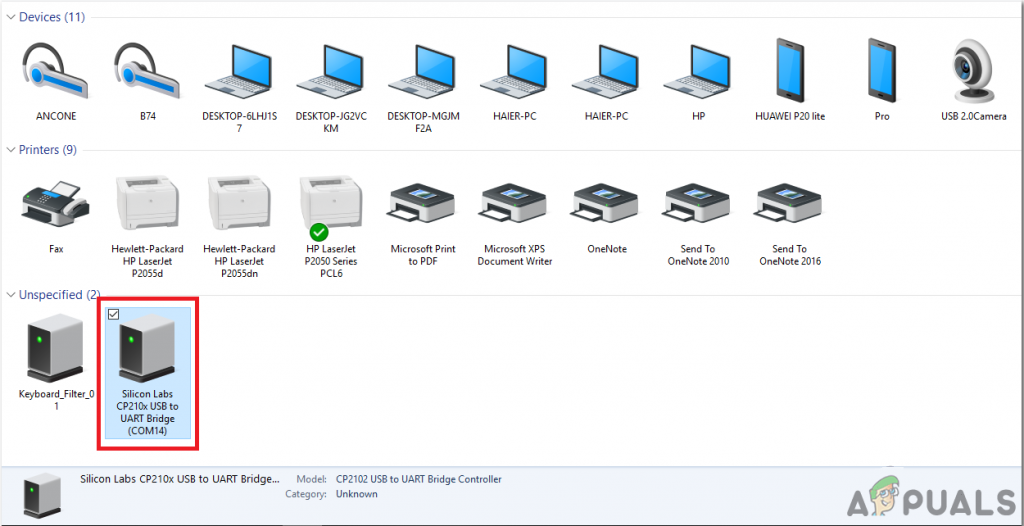
Port keresése
- Kattintson az Eszköz menüre. és állítsa a táblát Arduino Nano a legördülő menüből.
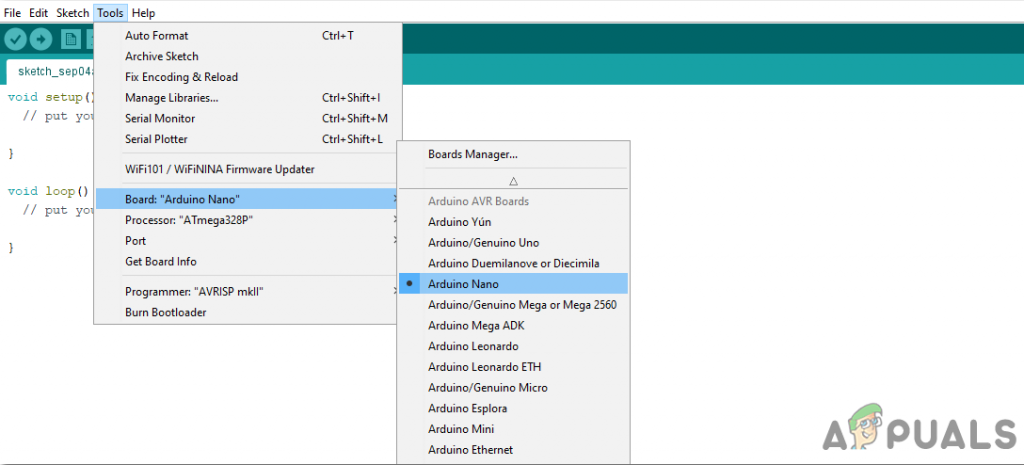
Tábla beállítása
- Ugyanabban az Eszköz menüben állítsa be a portot arra a portszámra, amelyet korábban a Eszközök és nyomtatók .
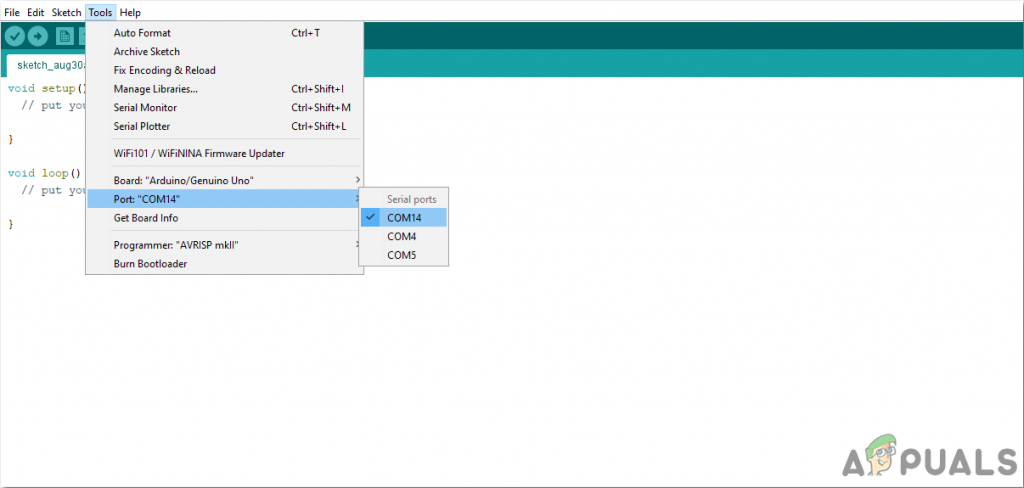
Port beállítása
- Ugyanebben az Eszköz menüben állítsa a Processort értékre ATmega328P (Old Bootloader).
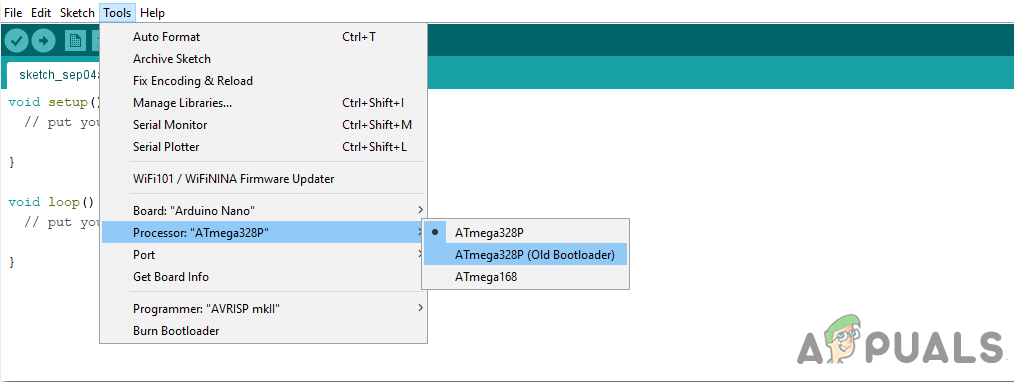
Processzor
- Töltse le az alább csatolt kódot, és illessze be az Arduino IDE-be. Kattintson a feltölteni gombot a mikrovezérlő-alaplapon lévő kód beírásához.
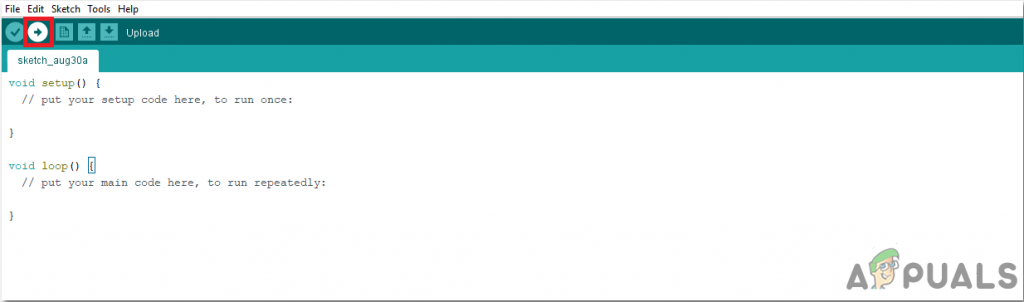
Feltöltés





A kód letöltéséhez kattints ide.
6. lépés: A kód megértése
A projekt kódja meglehetősen jól kommentált és nagyon könnyen érthető. De mégis, az alábbiakban röviden kifejtjük.
1. Induláskor inicializálják az Arduino csapszegeit, amelyeket később összekapcsolnak a LED-del és a hangjelzővel. Egy olyan változó is deklarálásra kerül, amely néhány értéket tárol a futási idő alatt. Ezután a PIR kezdeti állapotát LOW-ra állítjuk, ami azt jelenti, hogy azt mondják, hogy kezdetben nem érzékelnek mozgást.
int ledPin = 5; // válassza ki a LED csapját int Buzzer = 6; // válassza ki a csapot a Buzzer int bemenethezPin = 2; // válassza ki a bemeneti tűt (PIR érzékelőhöz) int pirState = LOW; // elindulunk, feltételezve, hogy nem észlelt mozgást int val = 0; // változó a pin állapot leolvasásához és tárolásához további felhasználásra
2. void setup () egy olyan funkció, amelyben inicializáljuk az Arduino tábla csapjait INPUT vagy OUTPUT néven. Az átviteli sebesség szintén ebben a funkcióban van beállítva. Az átviteli sebesség az a bit / másodperc sebesség, amellyel a mikrovezérlő kommunikál a külső eszközökkel.
void setup () {pinMode (ledPin, OUTPUT); // deklarálja a LED-t kimeneti pinMode-ként (Buzzer, OUTPUT); // deklarálja a Buzzert kimeneti pinMode-ként (inputPin, INPUT); // deklaráljuk az érzékelőt Serial.begin (9600) bemenetként; // állítson 9600-nak megfelelő sebességet}3. void loop () olyan funkció, amely újra és újra fut egy ciklusban. Ebben a funkcióban a mikrovezérlő be van programozva, így ha mozgást érzékel, akkor jelet küld a hangjelzőnek és a LED-nek, majd bekapcsolja őket. Ha a mozgást nem észlelik, akkor semmit sem fog tenni.
void loop () {val = digitalRead (inputPin); // beolvasott érték beolvasása a PIR érzékelőből, ha (val == HIGH) // Ha mozgást észlelünk a {digitalWrite (ledPin, HIGH) előtt; // kapcsolja be a LED-et digitalwrite (Buzzer, 1); // bekapcsolási késleltetés bekapcsolása (5000); // hozzon létre öt másodperces késleltetést, ha (pirState == LOW) {// ha az állapot kezdetben alacsony, azt jelenti, hogy nem észleltek mozgást, mielőtt // éppen bekapcsoltuk a Serial.println -t ('Mozgást észleltünk!'); // Nyomtassa ki a soros monitort, hogy érzékeli a mozgást pirState = HIGH; // a pirState értéke HIGH}} else {digitalWrite (ledPin, LOW); // a LED kikapcsolása digitalWrite (Buzzer, 0); // kapcsolja ki a hangjelzőt, ha (pirState == HIGH) {// ha az állapot kezdetben HIGH, az azt jelenti, hogy valamilyen mozgást észleltünk, mielőtt // éppen kikapcsoltuk a Serial.println ('Mozgás véget ért!'); // Nyomtassa soros monitorra, hogy a mozgás vége legyen pirState = LOW; // a pirState értéke LOW}}}}Tehát ez volt az egész eljárás egy biztonsági riasztási áramkör elkészítéséhez otthon, PIR érzékelő segítségével. Most már elkezdheti a munkát, és elkészítheti saját olcsó és hatékony biztonsági riasztóját.